Silniki prądu stałego (DC) to jedne z najpopularniejszych typów silników, które przekształcają energię elektryczną w energię mechaniczną poprzez obrót. Ich budowa i zasada działania opiera się na oddziaływaniu pola magnetycznego i prądu elektrycznego, które generują moment obrotowy.
Występują 2 podstawowe typy silników: szczotkowe i bezszczotkowe.
Silnik szczotkowy DC
Budowa silnika szczotkowego DC
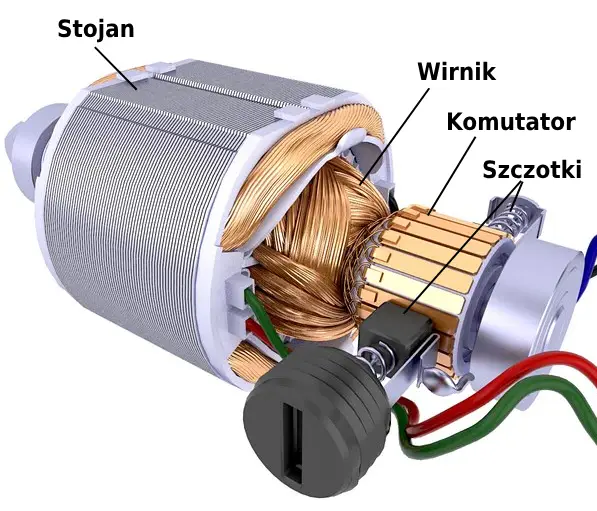
Stojan (stator): Nieruchoma część silnika, która tworzy pole magnetyczne. Może być wykonany z magnesów trwałych (w silnikach szczotkowych) lub cewek (w silnikach bezszczotkowych).
Wirnik (rotor): Ruchoma część silnika, która obraca się w polu magnetycznym. Wirnik składa się z zestawu przewodów nawiniętych na rdzeń z miękkiego żelaza. Gdy przez przewody przepływa prąd, powstaje wokół nich pole magnetyczne, które wchodzi w interakcję z polem magnetycznym stojana, co wywołuje moment obrotowy.
Komutator: Mechanizm, który przełącza kierunek prądu w uzwojeniach wirnika, znajdujący się w silnikach szczotkowych. W silnikach bezszczotkowych jest to realizowane elektronicznie.
Szczotki: Elementy w silnikach szczotkowych, które dostarczają prąd do wirnika poprzez komutator.
Zasada działania silnika szczotkowego
Zasada działania silnika DC opiera się na prawie Ampère’a oraz prawie Lorentza. Gdy przez przewodnik znajdujący się w polu magnetycznym płynie prąd, na przewodnik działa siła mechaniczna (siła Lorentza), która powoduje ruch.
- Prąd przepływa przez cewki wirnika – po uruchomieniu silnika prąd elektryczny przepływa przez szczotki i komutator do cewek na wirniku.
- Powstaje pole magnetyczne wokół cewek wirnika – zgodnie z prawem Ampère’a, prąd przepływający przez cewki wirnika tworzy pole magnetyczne wokół przewodników.
- Interakcja pól magnetycznych – pole magnetyczne stojana i pole magnetyczne wirnika oddziałują ze sobą, co wywołuje siłę mechaniczną, która próbuje obrócić wirnik. Siła Lorentza generuje moment obrotowy, który obraca wirnik.
- Komutator zmienia kierunek prądu – w momencie, gdy wirnik obróci się o pewien kąt, komutator zmienia biegunowość prądu w cewkach wirnika, co sprawia, że pole magnetyczne cewki zmienia swoją orientację. To pozwala na ciągły obrót wirnika.
Silnik bezszczotkowy BLDC
Silniki bezszczotkowe nie zawierają komutatora i szczotek, posiadają 3 uzwojenia, połączone w gwiazdę, którymi steruje się za pomocą specjalnego kontrolera. Ilość uzwojeń zazwyczaj jest wielokrotnością 3 podstawowych uzwojeń, aby zapewnić swobodny obrót wirnika.
Silniki bezszczotkowe prądu stałego (BLDC) mogą występować w dwóch głównych wariantach: z czujnikami położenia wirnika (ang. sensored) oraz bez czujników (ang. sensorless). Obie te wersje różnią się sposobem sterowania.
W silnikach bezszczotkowych z czujnikami stosuje się czujniki Halla lub inne czujniki położenia, które pozwalają na precyzyjne określenie aktualnej pozycji wirnika w stosunku do stojana. Czujniki te przekazują informacje do sterownika, który na ich podstawie odpowiednio steruje przełączaniem faz w uzwojeniach stojana.
Silniki BLDC z czujnikami są bardziej odpowiednie do zastosowań, które wymagają precyzyjnej kontroli momentu obrotowego, płynnego rozruchu i stabilnej pracy przy niskich prędkościach. Jednak są bardziej złożone i droższe.
Silniki bezszczotkowe bez czujników nie mają fizycznych detektorów położenia wirnika, takich jak czujniki Halla. Zamiast tego pozycja wirnika jest wykrywana na podstawie pomiarów napięcia indukowanego w uzwojeniach stojana (tzw. back-EMF, czyli napięcie zwrotne). Sterownik analizuje te napięcia i na ich podstawie szacuje, gdzie znajduje się wirnik.
Budowa silnika bezszczotkowego
- Stojan (Stator):
- Stojan w silniku bezszczotkowym jest zbudowany z uzwojeń elektromagnetycznych (cewek), które są zamocowane w nieruchomej części silnika. Uzwojenia te wytwarzają zmienne pole magnetyczne, które steruje ruchem wirnika.
- Wirnik (Rotor):
- Wirnik jest zbudowany z magnesów trwałych, które obracają się pod wpływem pola magnetycznego wytwarzanego przez stojan. Wirnik jest osadzony na łożyskach, co zapewnia płynny ruch obrotowy.
- Sterownik (Kontroler):
- Zamiast komutatora i szczotek, silnik bezszczotkowy używa elektronicznego sterownika do sekwencyjnego włączania i wyłączania uzwojeń stojana. Sterownik jest odpowiedzialny za odpowiednie przełączanie cewek, aby pole magnetyczne wirnika zawsze było przyciągane do właściwej pozycji.
- Czujniki Halla (opcjonalnie):
- W niektórych silnikach BLDC stosuje się czujniki Halla, które wykrywają położenie wirnika i dostarczają informacje do sterownika, aby ten mógł odpowiednio zmieniać prąd w uzwojeniach.
Zasada działania silnika bezszczotkowego
W silnikach BLDC główną różnicą w porównaniu do silników szczotkowych jest sposób sterowania prądem. Zamiast mechanicznego komutatora, przełączanie faz odbywa się za pomocą układów elektronicznych ESC.
- Elektroniczne przełączanie faz:
- Prąd płynie do cewek stojana w odpowiedniej sekwencji, tworząc zmienne pole magnetyczne. Sterownik zasila uzwojenia w sposób zsynchronizowany z położeniem wirnika, aby utrzymywać moment obrotowy.
- W każdym momencie uzwojenia stojana wytwarzają pole magnetyczne, które oddziałuje z magnesami na wirniku, wywołując obrót.
- Pole magnetyczne wirnika:
- Wirnik składa się z magnesów trwałych, które reagują na zmienne pole magnetyczne wytwarzane przez uzwojenia stojana. Zmiana pola w cewkach powoduje, że magnesy wirnika są przyciągane lub odpychane, co generuje moment obrotowy i wprawia wirnik w ruch.
- Zmienna częstotliwość przełączania:
- Częstotliwość, z jaką sterownik zmienia kierunek przepływu prądu w uzwojeniach, kontroluje prędkość obrotową silnika. Im szybsze przełączanie, tym szybciej obraca się wirnik.
- Bezszczotkowy charakter:
- Brak szczotek eliminuje straty związane z tarciem oraz zużycie elementów mechanicznych, co czyni silniki bezszczotkowe bardziej trwałymi i wydajnymi.
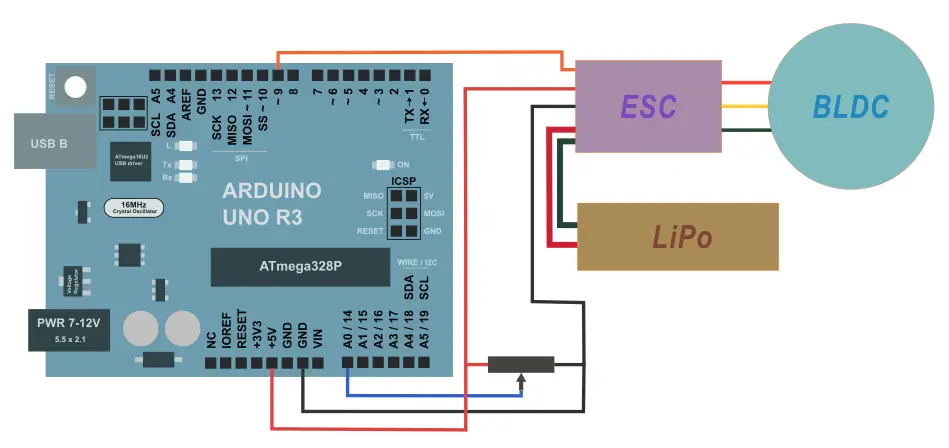
Połączenie silnika BLDC z Arduino
Parametry silnika
Moment obrotowy to siła obrotowa generowana przez silnik wyrażana w Nm lub kg*cm.
Np. silnik z momentem 4kg*cm będzie w stanie obrócić 4kg w odległości 1cm od środka wirnika lub
2kg w odległości 2cm,
1kg w odległości 4cm, itd…
Prędkość obrotowa (RPM) to liczba obrotów na minutę. Moc wyjściowa (W) to moc mechaniczna generowana przez silnik (iloczyn momentu obrotowego i prędkości obrotowej).