Enkoder służy do określania: położenia, kąta, kierunku, prędkości obrotu.
Pobierz informacje w postaci PDF
Typy enkoderów:
Enkodery przyrostowe
1.Generują impulsy w trakcie obrotu pokrętła
2.Nie podają bezpośrednio aktualnej pozycji
3.Posiadają dwa wyjścia: A i B, które generują sygnały przesunięte w fazie o 90°.
Enkodery absolutne
1.Podają dokładną pozycję wału w jednym obrocie, co pozwala określić położenie bez konieczności zliczania impulsów.
2.Często są bardziej złożone i droższe od enkoderów przyrostowych.
Rozdzielczość
Rozdzielczość mówi o tym, ile impulsów zostanie wygenerowanych podczas jednego obrotu, tym samym definiuje kąt obrotu.
Enkoder z rozdzielczością 20 imp./obr. wyznacza kąt obrotu równy:
360˚/ 20 = 18˚.
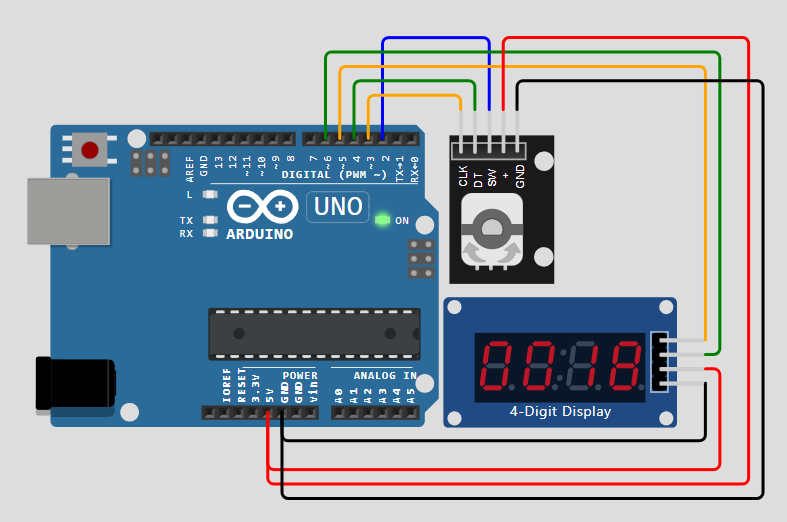
Połączenie enkodera z Arduino
Enkodery stosowane z Arduino wymagają rezystorów podciągających (enkodery na płytce mają wbudowane rezystory na dolnej stronie).

Jak działa przyrostowy enkoder magnetyczny?

Enkodery magnetyczne działają na podstawie efektu Halla. Obracający się magnes wzbudza sygnał na czujniku. Enkodery wyposażone w 2 czujniki (A i B) pozwalają śledzić kierunek obrotu. Drugi czujnik generuje sygnał przesunięty o 90. Podczas obrotu w prawo, sygnał wysoki w pierwszej kolejności powstaje na czujniku A, przy obrocie w lewo jest odwrotnie. Zaczytywanie i porównywanie tych zmian pozwala określić kierunek obrotu.
Jak działa przyrostowy enkoder optyczny?

Enkoder optyczny działa na podstawie strumienia światła (dioda lub laser).
Obracająca się tarcza zawiera miejsca przezroczyste i nieprzezroczyste, które na przemian przepuszczają wiązkę światła.
Poniżej tarczy znajduje się fototranzystor lub fotodioda, która generuje sygnał wysoki po wykryciu wiązki światła.
Przykładowe programy Arduino z enkoderem
Program 1: Zliczanie impulsów podczas obrotu enkodera w obu kierunkach

#define CLK 3
#define DT 4
int counter = 0;
void setup() {
pinMode(CLK, INPUT);
pinMode(DT, INPUT);
Serial.begin(9600);
}
void loop() {
readEncoder();
}
void readEncoder(){
static int lastStateCLK = digitalRead(CLK);
int currentStateCLK = digitalRead(CLK);
if (currentStateCLK != lastStateCLK && currentStateCLK == 1) {
if (digitalRead(DT) != currentStateCLK) {
counter--;
if (counter < 0) counter = 0;
} else {
counter++;
if (counter > 20) counter = 20;
}
Serial.println(counter);
}
lastStateCLK = currentStateCLK;
}
Program 2: Timer z menu ustawiającym czas odliczania wyświetlany na TM1637
Zasada działania programu:
Po włączeniu timer odlicza cyklicznie czas do 0.
Po wciśnięciu przycisku enkodera, zatrzymuje się odliczaie czasu i przechodzi do menu. W menu zmienia się interwał czasu przekręcając enkoder w lewo lub prawo. Po wciśnięciu przycisku nowa wartość zostaje ustawiona i zegar zaczyna odliczać w dół od nowa.
#include <TM1637Display.h>
#define CLK 3
#define DT 4
#define SW 2
#define CLK_DISPLAY 5
#define DIO 6
TM1637Display display(CLK_DISPLAY, DIO);
class Astratimer {
private:
int _countDelay;
unsigned long _previousMillis;
public:
Astratimer(int countDelay)
: _countDelay(countDelay), _previousMillis(0) {}
bool canExecute() {
if (millis() - _previousMillis >= _countDelay) {
_previousMillis = millis();
return true;
}
return false;
}
};
Astratimer tim1(1000);
bool lastLed = true;
int counter = 0;
int interval = 10;
volatile int menuState = -1;
void displayNumber(int num) {
display.showNumberDec(num, true);
}
void toggleMenu() {
menuState *= -1;
}
void countDown() {
if (counter > 0) {
counter--;
displayNumber(counter);
} else {
counter = interval;
displayNumber(counter);
}
}
void setup() {
pinMode(CLK, INPUT);
pinMode(DT, INPUT);
pinMode(SW, INPUT_PULLUP);
pinMode(14, OUTPUT);
attachInterrupt(digitalPinToInterrupt(SW), toggleMenu, FALLING);
display.setBrightness(1);
display.clear();
}
void loop() {
static int lastStateCLK = digitalRead(CLK);
int currentStateCLK = digitalRead(CLK);
if (menuState == 1) {
if (currentStateCLK != lastStateCLK && currentStateCLK == 1) {
if (digitalRead(DT) != currentStateCLK) {
interval--;
if (interval < 5) interval = 5;
} else {
interval++;
if (interval > 60) interval = 60;
}
displayNumber(interval);
counter = interval;
}
lastStateCLK = currentStateCLK;
} else {
if (tim1.canExecute()) {
countDown();
}
}
}
Program 3: Enkoder z wyświetlaczem i diodami
Program wzbogacony o szerego diod LED, które będą gasnąć proporcjonalnie do pozostałego czasu. Przy osttanich 3 sekundach ostatnia dioda zaczyna mrygać, a w ostatniej sekundzie włączy się piezo bzyczek.

#include <TM1637Display.h>
#define CLK 3
#define DT 4
#define SW 2
#define CLK_DISPLAY 5
#define DIO 6
TM1637Display display(CLK_DISPLAY, DIO);
class Astratimer {
private:
int _countDelay;
unsigned long _previousMillis;
public:
Astratimer(int countDelay) : _countDelay(countDelay), _previousMillis(0) {}
bool canExecute() {
if (millis() - _previousMillis >= _countDelay) {
_previousMillis = millis();
return true;
}
return false;
}
};
Astratimer tim1(1000);
Astratimer tim2(500);
bool lastLed = true;
int counter = 0;
int interval = 20;
volatile int menuState = -1;
int leds[] = {7,8,9,10,11,12};
void displayNumber(int num) {
display.showNumberDec(num, true);
}
void toggleMenu() {
menuState *= -1;
}
void countDown() {
if (counter > 0) {
counter--;
displayNumber(counter);
if(counter > 3){
int ledn = map(counter, 1, interval, 6,-1);
digitalWrite(leds[ledn-1], LOW);
}
else{
for(int i=0; i<6; i++){
digitalWrite(leds[i], LOW);
}
}
} else {
counter = interval;
displayNumber(counter);
for(int i=0; i<6; i++){
digitalWrite(leds[i], HIGH);
}
}
}
void setup() {
for(int i=0; i<6; i++){
pinMode(leds[i], OUTPUT);
}
pinMode(CLK, INPUT);
pinMode(DT, INPUT);
pinMode(SW, INPUT_PULLUP);
pinMode(14, OUTPUT);
attachInterrupt(digitalPinToInterrupt(SW), toggleMenu, FALLING);
Serial.begin(9600);
display.setBrightness(1);
display.clear();
}
void loop() {
static int lastStateCLK = digitalRead(CLK);
int currentStateCLK = digitalRead(CLK);
if (menuState == 1) {
if (currentStateCLK != lastStateCLK && currentStateCLK == 1) {
if (digitalRead(DT) != currentStateCLK) {
interval--;
if (interval < 10) interval = 10;
} else {
interval++;
if (interval > 60) interval = 60;
}
for(int i=0; i<6; i++){
digitalWrite(leds[i], HIGH);
}
displayNumber(interval);
counter = interval;
}
lastStateCLK = currentStateCLK;
} else {
if (tim1.canExecute()) {
countDown();
}
if(counter < 3){
if(tim2.canExecute()){
digitalWrite(leds[5], !digitalRead(leds[5]));
}
}
if(counter == 1){
tone(14, 261, 500);
}
}
}