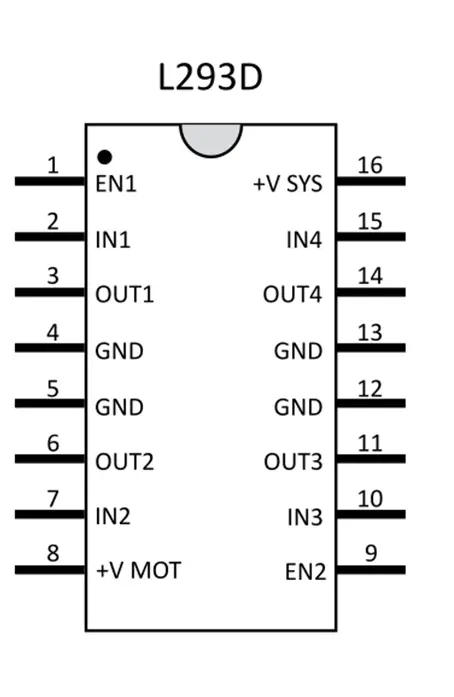
L293D to układ IC do sterowania silnikami DC.
Liczba kanałów: 2
Napięcie zasilania: < 36V
Prąd na kanał (chwilowy): 600mA (1.2A)
Do układu można podłączyć 4 silniki w trybie half-bridge lub 2 silniki w trybie full-bridge.
Tryb half-bridge (jedno wyjście OUT) daje możliwość ruchu w jednym kierunku z prędkością ustaloną przez pin wspólny EN1.
Tryb full-bridge daje pełną kontrolę w dwóch kierunkach. przy natężeniu ciągłym 600mA i chwilowym 1.2A.
Napięcie pinu 16 (zasilania części logicznej) powinno wynosić 5V.
Sterowanie silnikiem za pomocą L293D
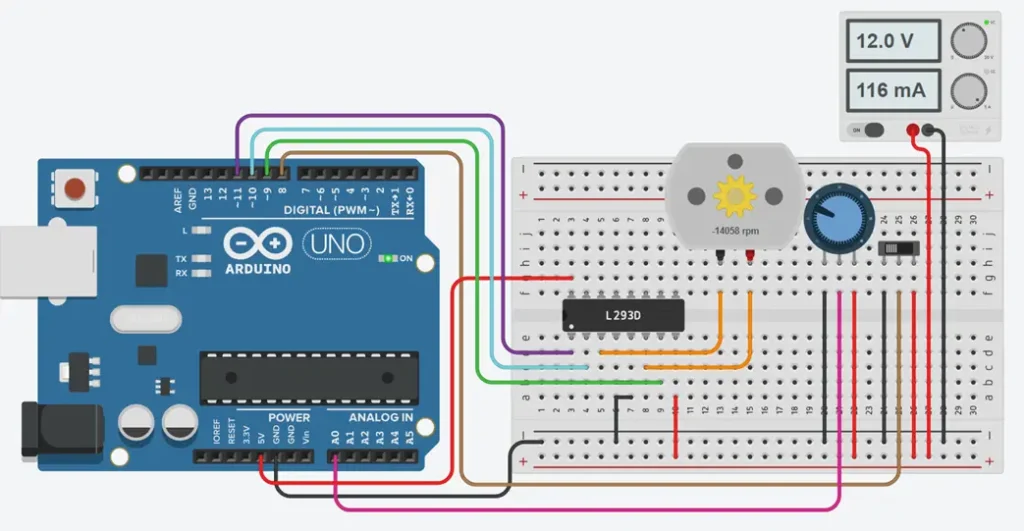
int enablePin = 11;
int in1Pin = 10;
int in2Pin = 9;
int switchPin = 8;
int potPin = A0;
void setup(){
pinMode(in1Pin, OUTPUT);
pinMode(in2Pin, OUTPUT);
pinMode(enablePin, OUTPUT);
pinMode(switchPin, INPUT_PULLUP);
}
void SetMotor(int speed, boolean dir){
analogWrite(enablePin, speed);
digitalWrite(in1Pin, !dir);
digitalWrite(in2Pin, dir);
}
void loop(){
int speed = map(analogRead(potPin), 0, 1023, 0, 255);
boolean dir = digitalRead(switchPin);
SetMotor(speed, dir);
}