Silniki serwo steruje się za pomocą sygnału PWM. Współczynnik wypełnienia decyduje o kącie obrotu serwa.
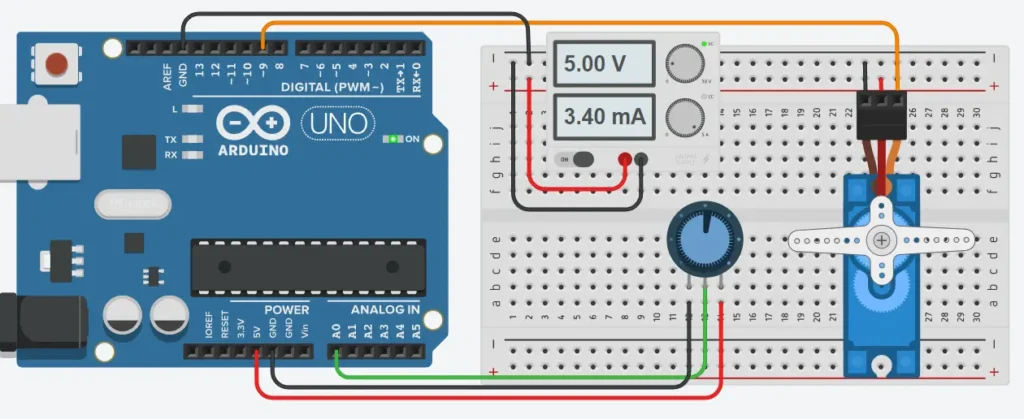
Przykład: Zmiana obrotu serva za pomocą potencjometru
#include <Servo.h>
int servoPin = 9;
int pos;
Servo servo1;
void setup(){
servo1.attach(servoPin);
Serial.begin(9600);
}
void loop(){
int pot = analogRead(A0);
pos = map(pot, 0, 1023, 0, 180);
servo1.write(pos);
Serial.println(servo1.read());
}